
Parkeerbeheersystemen gaan mogelijk richting 3D
Steden over de hele wereld experimenteren met slimmere manieren om parkeren te beheren. Sommigen gebruiken gegevens over de parkeerbezetting om de prijzen dynamisch aan te passen en zo voldoende beschikbare ruimte te garanderen; anderen zetten parkeersystemen langs de weg in die zijn uitgerust met grondsensoren en integreren deze in bredere slimme stadsplatforms; weer anderen maken gebruik van netwerksensoren om duizenden individuele parkeerplaatsen te monitoren. Deze initiatieven delen een duidelijk doel: de verkeersopstoppingen verminderen, de efficiëntie van parkeren langs de weg verbeteren en effectiever gebruik maken van de beperkte stedelijke ruimte.
Hoewel dezeparkeerbeheersystemenzijn in tal van landen over de hele wereld geïmplementeerd, maar velen vertrouwen nog steeds op gefragmenteerde of onvolledige gegevens. De installatie en het grootschalige onderhoud van grondsensoren/lusdetectoren zijn kostbaar, terwijl op camera's gebaseerde bewakingssystemen gevoelig kunnen zijn voor lichtomstandigheden of privacyproblemen kunnen veroorzaken. Terwijl steden hun slimme parkeerinitiatieven proberen op te schalen, ligt de uitdaging niet alleen in het verzamelen van gegevens, maar ook in het betrouwbaar, efficiënt en op schaal doen ervan.
LiDAR-technologie begint aanzienlijke grip te krijgen binnen de sector van parkeerbeheersystemen. LiDAR – een acroniem voor Light Detection and Ranging – maakt gebruik van laserpulsen om nauwkeurig driedimensionale informatie over de fysieke omgeving vast te leggen, waardoor een robuuste databasis wordt geboden voor modern parkeerbeheer. Van het monitoren van de bezetting van parkeerplaatsen tot het classificeren van voertuigtypen, op LiDAR gebaseerde systemen stellen operators in staat inzicht te krijgen in de parkeerdynamiek met een niveau van granulariteit dat traditionele oplossingen moeilijk kunnen evenaren.

Waarom LiDAR goed geschikt is voor slimme parkeerbeheersystemen?
In de kern werkt LiDAR door laserpulsen te gebruiken om afstanden te meten. Deze metingen genereren een dichte, driedimensionale weergave van de omgeving, ook wel een 'puntenwolk' genoemd. In tegenstelling tot camerabeelden worden deze gegevens niet beïnvloed door omgevingslichtomstandigheden; in plaats daarvan beschrijft het de geometrie van de omringende omgeving met hoge precisie.
Deze 3D-gegevens bieden tal van voordelen voor parkeertoepassingen.
Ten eerste handhaaft LiDAR consistente prestaties onder voortdurend veranderende omgevingsomstandigheden. Factoren die doorgaans camerasystemen in gevaar brengen, zoals duisternis, verblinding of schaduwen, hebben een minimale impact op lasergebaseerde metingen. Dit maakt LiDAR bijzonder geschikt voor parkeerplaatsen buiten, garages en omgevingen langs de weg waar de lichtomstandigheden gedurende de dag fluctueren.
Ten tweede legt LiDAR fysieke structuren vast in plaats van visuele verschijningen. Voertuigen, stoepranden, obstakels en voetgangers worden allemaal gedetecteerd als driedimensionale objecten. Hierdoor kunnen algoritmen op betrouwbare wijze objecten identificeren en volgen zonder eerst tweedimensionale beelden te hoeven analyseren die vatbaar zijn voor verkeerde interpretaties.
Ten slotte ondersteunen LiDAR-gegevens privacybewust toezicht. Omdat deze technologie afstand meet in plaats van visuele details, worden er geen identificeerbare kenmerken vastgelegd, zoals menselijke gezichten of kentekenplaten, tenzij aangevuld met extra sensoren. Voor gemeenten en exploitanten die te maken hebben met strenge eisen op het gebied van gegevensbescherming kan dit een aanzienlijk voordeel zijn. Gezamenlijk maken deze kenmerken LiDAR tot een krachtige basis voor datagestuurde parkeersystemen.

Bezettingsmonitoring: LiDAR in praktische parkeerbeheersysteemtoepassingen.
Een van de meest directe toepassingen van LiDAR in parkeeromgevingen is het monitoren van de voertuigbezetting.
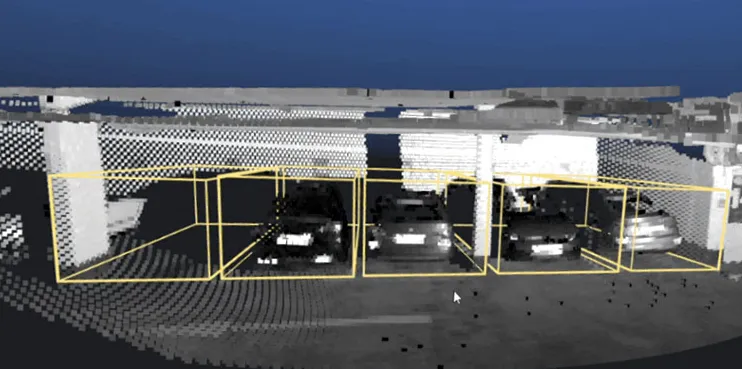
In een typisch installatiescenario worden LiDAR-sensoren gemonteerd op bestaande infrastructuur, zoals lichtmasten of gevels van gebouwen, met uitzicht op een parkeerplaats of straatgebied. De sensoren scannen continu hun omgeving en genereren een stroom van 3D-datapunten. Software verwerkt deze gegevens in realtime om objecten te detecteren, hun exacte locatie te bepalen en ze te classificeren.
Binnen het systeem kunnen parkeerplaatsen worden aangewezen. Wanneer een voertuig de bewaakte zone binnengaat, detecteren de sensoren dit binnen de puntenwolk door een object te identificeren dat voorheen niet aanwezig was. De gedetecteerde punten veroorzaken een verandering in de bezettingsstatus van de parkeerplaats. Wanneer het voertuig vertrekt, wordt de ruimte vervolgens weer als beschikbaar gemarkeerd.
Vanwege de extreem hoge nauwkeurigheid van LiDAR-gegevens kunnen groottedrempels worden vastgesteld voor objecten die binnen elke bewakingszone worden gedetecteerd. Dit zorgt ervoor dat kleine voorwerpen, zoals winkelwagentjes, puin of passerende voetgangers, geen valse bezettingsgebeurtenissen veroorzaken. Een parkeerplaats wordt alleen als bezet gemarkeerd als het gedetecteerde object de vooraf ingestelde parameters overschrijdt (bijvoorbeeld de typische afmetingen van een voertuig). Dit configureerbare filtermechanisme verbetert de detectienauwkeurigheid en zorgt voor betrouwbare bezettingsgegevens, zelfs in complexe omgevingen die worden gekenmerkt door frequente voertuigbewegingen.
Omdat LiDAR uitgebreide ruimtelijke informatie kan vastleggen, kan één enkele sensor vaak meerdere parkeerplaatsen tegelijk bewaken. In gestructureerde omgevingen, zoals parkeerterreinen of stoepranden met duidelijk gedefinieerde grenzen, kan één enkele installatie effectief een hele zone bestrijken.
Hoewel het handig is om te weten of een parkeerplaats bezet is, kan het nog waardevoller zijn om te begrijpen ‘wat’ deze in beslag neemt.
LiDAR-gebaseerdparkeerbeheersystemenkan voertuigen classificeren op basis van hun grootte en vorm. Door de 3D-geometrie te analyseren die in de puntenwolk is vastgelegd, kunnen algoritmen onderscheid maken tussen categorieën zoals personenauto's, bestelwagens, vrachtwagens of tweewielige voertuigen.
Deze informatie opent de deur naar een breed scala aan praktische toepassingen. Exploitanten kunnen bijvoorbeeld analyseren of parkeerplaatsen langs de weg, oorspronkelijk bedoeld voor het afzetten van passagiers op korte termijn, vaak worden bezet door bestelauto's. Op dezelfde manier kunnen gegevens over grote voertuigen steden helpen bij het beoordelen van de parkeervraag binnen laadzones of commerciële parkeerplaatsen.
Voertuigclassificatie maakt ook een effectievere handhaving mogelijk. Als regelgeving bepaalde typen voertuigen verbiedt om specifieke ruimtes te gebruiken, kunnen geautomatiseerde monitoringsystemen potentiële overtredingen ter beoordeling signaleren.
Binnen parkeerfaciliteiten helpen voertuigclassificatiegegevens exploitanten te begrijpen hoe voertuigen van verschillende groottes de capaciteit en de efficiëntie van de verkeersstroom beïnvloeden. Nu stedelijke wagenparken steeds diverser worden – variërend van compacte elektrische voertuigen tot grote bestelwagens – wordt deze informatie steeds belangrijker voor de planning van faciliteiten.
Belangrijk is dat deze analyses gebaseerd zijn op driedimensionale kenmerken in plaats van op visuele herkenning. Het systeem kan identificeren dat een object de afmetingen en vorm heeft van een bestelwagen of vrachtwagen, zonder de kentekenplaten te hoeven lezen of visuele details vast te leggen.
De parkeersector maakt geleidelijk een transitie door van statische infrastructuur naar dynamisch, datagedreven beheer. Deze transitie vereist het balanceren van verschillende concurrerende eisen – waaronder particuliere voertuigen, vrachtvervoer, gedeelde mobiliteitsdiensten en gebruik van de openbare ruimte – binnen de beperkte capaciteit van trottoirs en parkeerterreinen.
Terwijl steden de rol van parkeren binnen het bredere transport-ecosysteem blijven heroverwegen, zullen technologieën die nauwkeurige, privacybewuste gegevens kunnen leveren een steeds belangrijker rol gaan spelen. LiDAR ontpopt zich snel als een belangrijk hulpmiddel waarmee exploitanten de parkeerinfrastructuur door een nieuwe lens kunnen bekijken binnen hun parkeerbeheersystemen.
Stuur onderzoek




X
We gebruiken cookies om u een betere browse-ervaring te bieden, het siteverkeer te analyseren en de inhoud te personaliseren. Door deze site te gebruiken, gaat u akkoord met ons gebruik van cookies.
Privacybeleid